

Американские разработчики из Лаборатории робомеханики Университета Карнеги-Меллон создали уникального робота-скалолаза. Новинка получила название LORIS. Данный четвероногий робот имеет существенные отличие от своих аналогов.
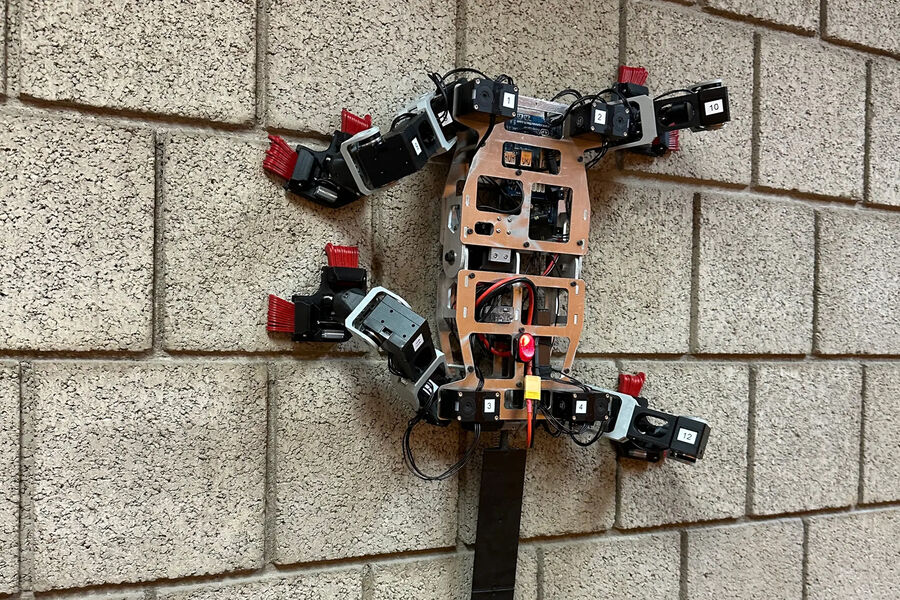
Каждая его нога имеет микроспинные захваты, состоящие из множественных мелких крючков. Именно с помощью этих крючков робот цепляется за щели в поверхностях. Таким образом, LORIS преодолевает любые шероховатые поверхности без особых усилий. Он с легкостью способен забраться по стене из камня или кирпича в отличие от роботов, имеющих всасываемую систему захвата. Такие роботы эффективны лишь на гладких поверхностях.
Каждая нога LORISа оснащена разветвленным микроспинным захватом, имеющим две группы шипов. В свою очередь шипы расположены под прямым углом друг к другу. А сам захват соединяется с ногой робота пассивным лучезапястным суставом, активно реагирующим на движение ноги.
Разработчики отмечают, что LORIS представляет собой многофункционального робота, которого можно использовать для мониторинга строительных работ, исследование труднодоступных мест и поисково-спасательных операций.